Video Analysis
The video’s authenticity and the technology powering this drone cannot be denied
Disclaimer:
If you find yourself getting bored while reading this analysis and are already confident that this drone utilizes gravitic propulsion, feel free to skip to the next section and return to this section if any doubts arise. By the end of this analysis, you should be confident that this drone locally distorts gravity, space, time, and light. After reading, I suggest that you analyze the video yourself to independently verify its authenticity and to be sure of the drone's technology. Just make sure to read my witness testimony before performing your analysis, along with the biological effects of the drone in the next section.I am summarizing the anomalies in simple terms so you do not have to be an "expert" to understand, and none of the explanations are from AI. This analysis is not perfect, as no analysis method is perfect. Analysis methods can not account for rolling shutter distortions, my slight camera movement, and other similar factors with 100% accuracy, especially given that the distortions are non-conventional and field-based. Allow for a small margin of error. What matters most is my eyewitness testimony, the authenticity of this video, all phenomena that only match gravitic propulsion, and Matthew Livelsberger's interconnected testimony.Despite any imperfections in this analysis, when combined, all of the anomalies below cannot be explained by the laws of physics, conventional drone technology, or normal camera behavior. A drone utilizing gravitic propulsion is the only logical conclusion, and all of the anomalies make perfect sense when you consider that these drones locally manipulate the surrounding spacetime and are designed to be uncounterable by any air defense system. The original video file, hex data, metadata, and additional proof of the video's authenticity are at the bottom of the page, and the Python commands used in this analysis are hyperlinked in each applicable section.
Eyewitness Testimony
Flight path
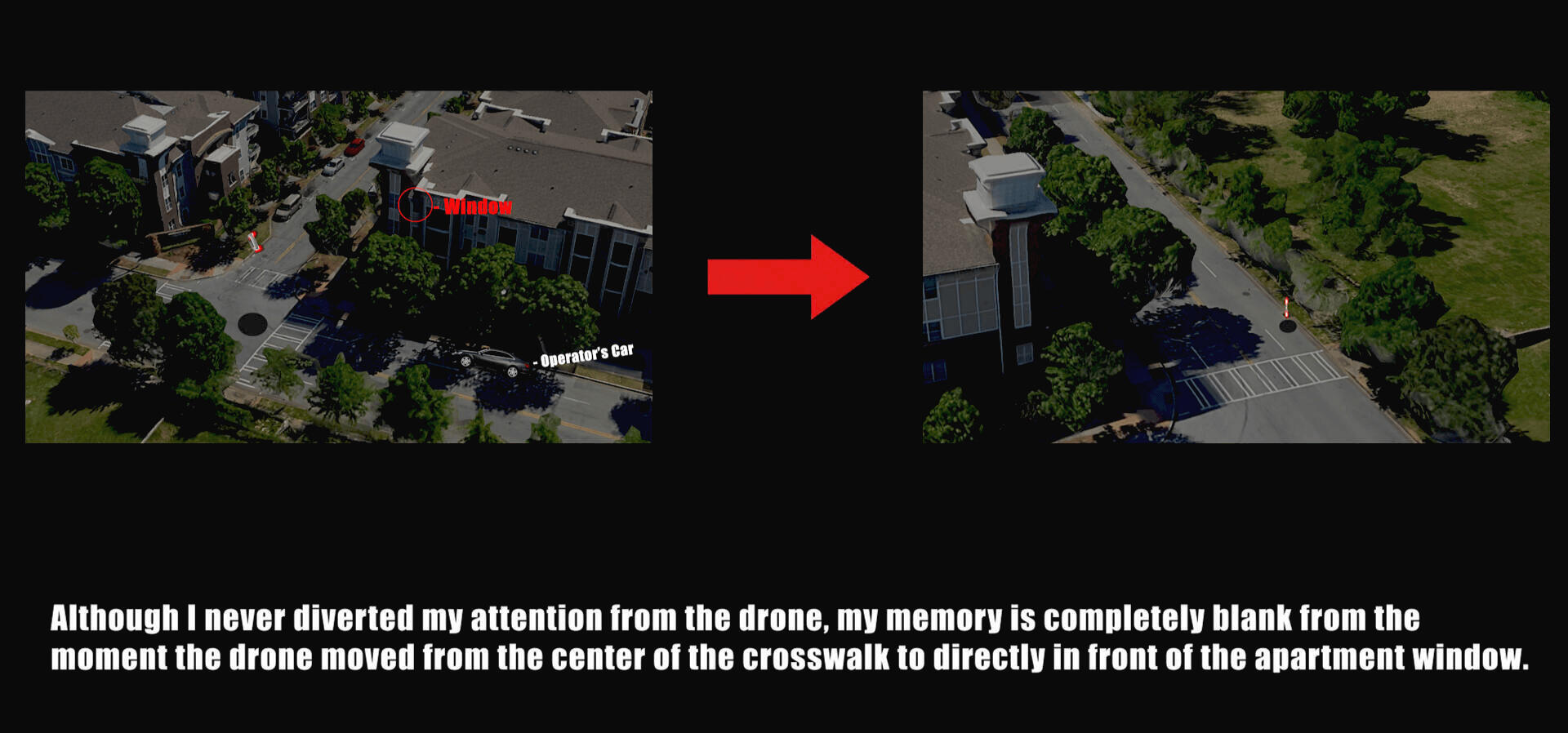
An accurate video reenactment of the majority of the drone's flight
The operators parked on the side of the street directly in front of the apartments, then deployed the drone from ground level within the intersection, pointing it toward the corner apartments and using the building as a reflective surface to control and guide the drone before it ascended towards the highway and hospital. While the drone was operating in the street before its ascent, it was pointed directly at the window I was in for its entire flight, its altitude was never higher than the top of the apartment, and it operated around 50 feet directly in front of me at eye level for approximately 30 seconds. This provided me with a perfect view of the drone's movements and all of its visible components. Keep the drone's flight path and in-person appearance in mind as you learn about the drone's anomalous characteristics, the distortion it causes in the video, and the cognitive and biological phenomena I experienced, as they are both crucial for concluding the drone's use of gravitic propulsion.Although I do not remember the exact flight path with 100% accuracy, the drone's placement in the street, represented by the grey circle under the drone, as well as the drone's depicted altitude, are extremely accurate. Although the drone was launched from the ground within the intersection, I did not observe the first few seconds of its flight since my blinds were initially closed. The drone's speed in the reenactment above, except for its descent from the hospital to the apartment window, is also very similar to its real-life speed. I also cannot accurately recall the exact number of times the drone moved back and forth along its horizontal axis after each ascent and descent.It is also essential to remember that during the original video, the drone began its descent once the redshift onsets in the drone's core, and its descent lasted until it rotated into a horizontal orientation at around the 4.5-second mark of the video. The section of this flight-path reenactment that depicts the first 4.5 seconds of the iPhone video is an approximation, since I did not see the drone while recording until I began speaking in the video, when it was directly above the apartment and in its horizontal orientation.
The drone's appearance
Two red lights, Two metal panels, & A warped middle


In person, the drone's entire midsection was a fully transparent tube. There was an extremely bright red light at both the top and bottom, and there was an extremely thin sheet of metal on both the left and right sides of the drone that held the drone's two lights and its core in place. Apart from the two lights, the sheet of metal on each side, and the transparent tubular middle, it was extremely obvious that the drone had no other visible components, and no visible propulsion system. It looked almost exactly like the "My POV" photo above, except the middle was in the shape of a pneumatic tube that protruded from the front and back of the drone.When looking through the drone's transparent midsection, all of the light behind it was severely warped, with the warped light always following multiple wave patterns that proceeded from the top, bottom, left, and right of its core, with all of the wave patterns appearing to converge toward the center of the drone, as depicted by the lines in the drone's core in the two photos above. Initially, I assumed that the drone's core could have been liquid inside a tube, as looking through the middle was like looking at a rippling pool of water.Next, I will recap what I witnessed when the operators repurposed and maneuvered the drone to target me shortly after they noticed that a witness was present in the window.

As I mentioned in the flight path reenactment, there is one section of the encounter that I have no memory of. I have no recollection of how the drone went from being positioned slightly below window level near the middle of the intersection to being repositioned just a few feet in front of the trees on the opposite sidewalk, around 5 inches above the ground, and directly in the middle of my line of sight as it slowly ascended vertically. But upon regaining my ability to encode memories once it began its climb, I had a near-perfect view of the drone’s core.The core's warp never appeared to contain straight lines or jagged edges, just multiple moving waves converging towards the very center of the drone. At one point while I was looking through the top-middle section of the drone's core, I vividly remember the grass above the wall pushing down on the graffiti closest to the left side of the crosswalk, with the distortion forming a U-shape. When viewed through the drone's center, the grass behind the graffiti appeared nearly black instead of its original green, while its color when not viewed through the drone’s core remained unchanged, as if the wavelength of the grass's light was being altered. Each wave pattern in the drone was clearly defined, and each wave would constantly move as the drone climbed, with new waves emerging from each direction every second or so. The waves emerging from the side of the drone moved horizontally, while those from the top and bottom moved vertically towards the center. However, I can not remember the exact wave pattern with 100% confidence, and I can not remember whether the waves were oscillating or if new waves were emerging from outside the drone.Each new wave seemed to slightly differ in shape, even if it originated from the same side of the drone's core. A very small area in the absolute center of the drone's core featured no waves, indicating that it was either the attractor or source of the wave patterns. The drone appeared to move the slowest during this period of its flight, and I observed this vertical climb for around 6 seconds. Aside from what seemed to be an extremely slow climb while it was in the very center of my field of view, the drone moved at a constant speed throughout its entire flight.
Transparent core on video
Confirms my eyewitness testimony of the drone's appearance

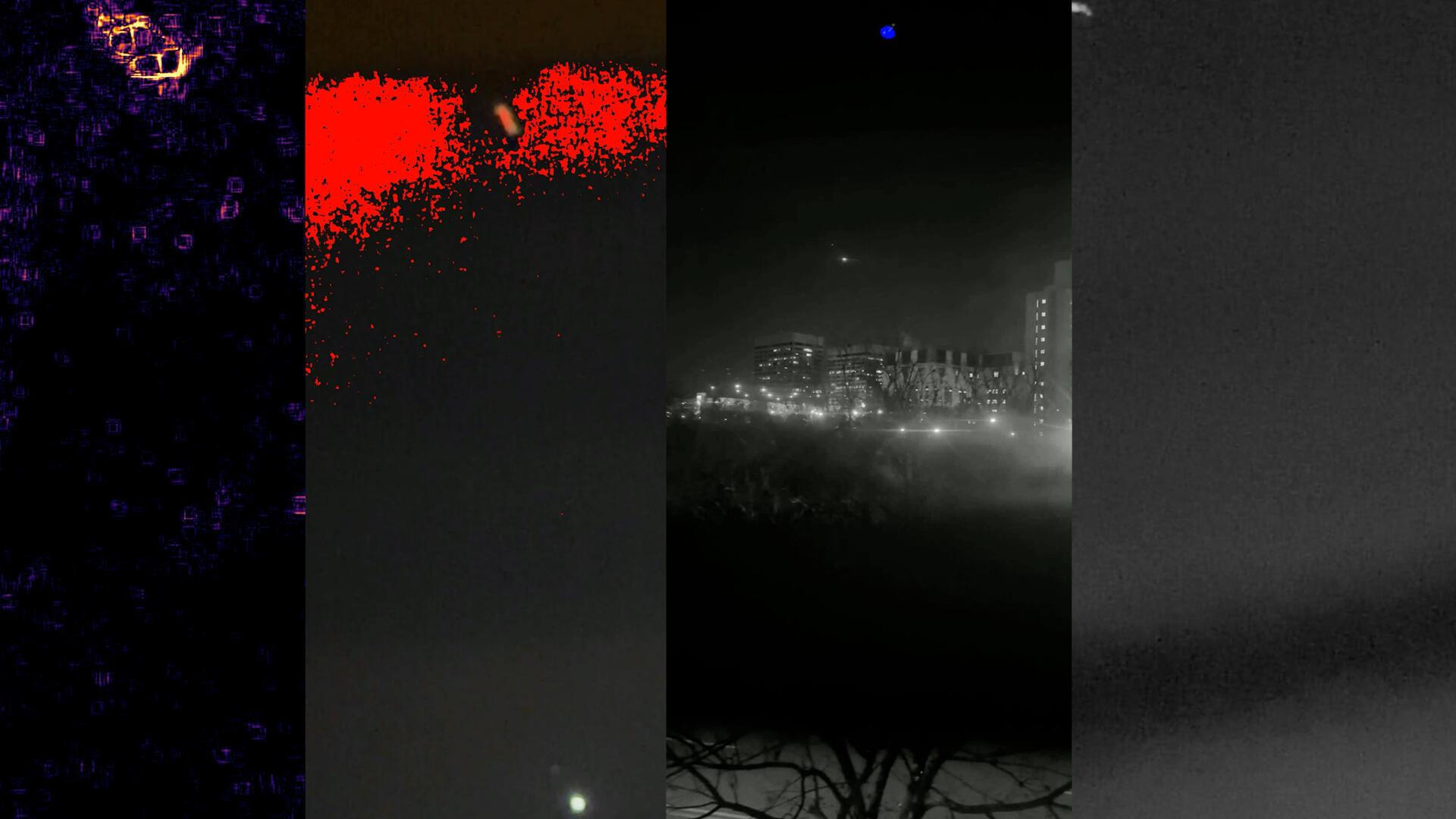
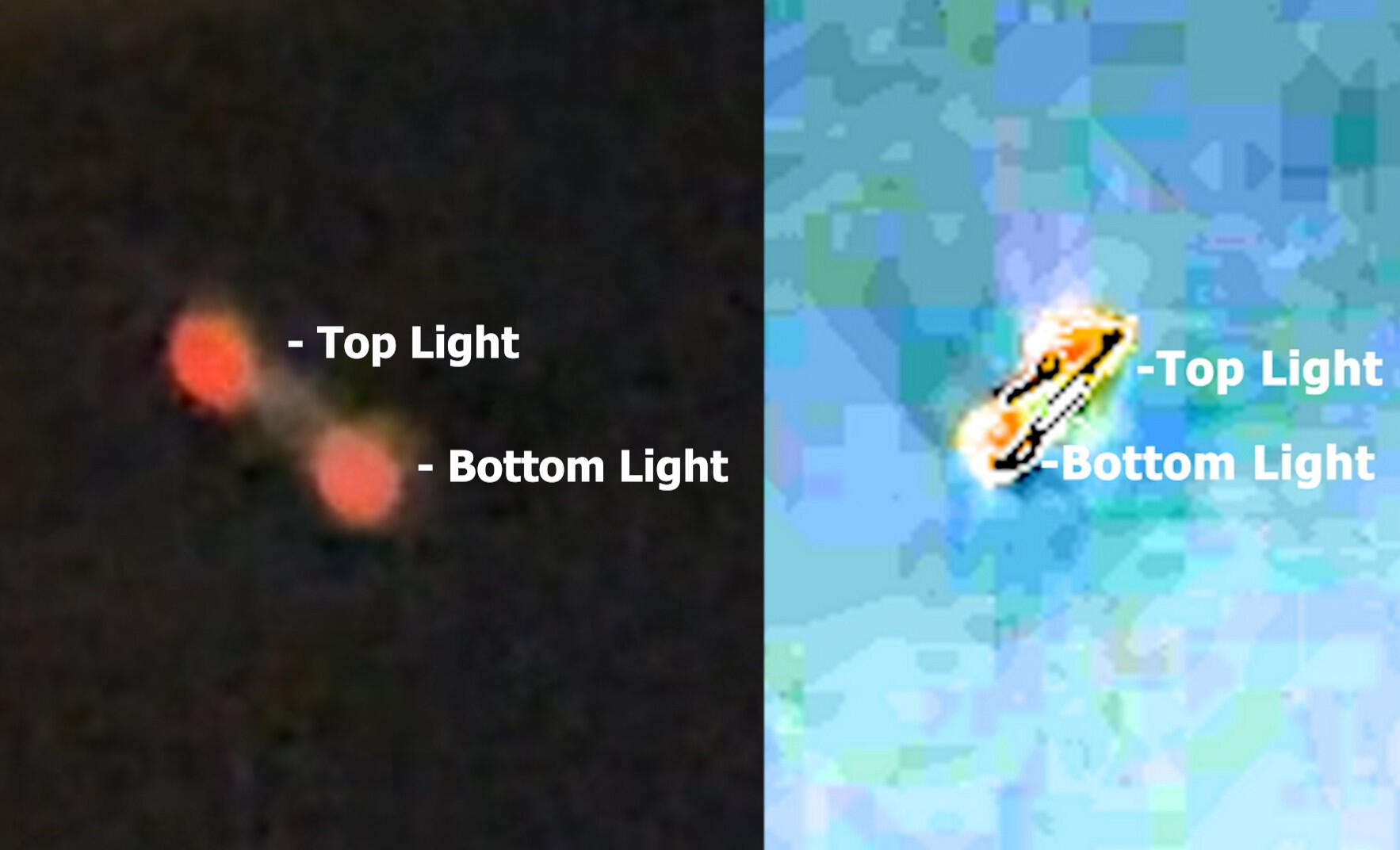
Thankfully, you do not have to blindly accept my testimony regarding the transparent nature of the drone's core, the red light at the top and bottom, the thin sheet of metal on both sides, and its lack of wings, propellers, or any other visible form of propulsion, since this key factor in determining the drone's use of gravitic propulsion is clearly visible in the video. At the start of the video, the drone faces away from the camera, as indicated by the absence of its two red lights, before it rotates toward the camera shortly after the video begins. The drone's initial rotation and the transparent nature of its core can be confirmed by adjusting the color of the first few frames, when the drone is facing away from the camera.As shown in the video above and in the image below, two distinct red lights are visible at the top and bottom of the drone, matching the position and shape of the drone's lights as shown later in the video and as I witnessed in person:
During the next few frames, the redshift in the drone's core begins, and the drone's bottom red light disappears while the red light at the top remains visible. This parallels the same behavior of the drone's bottom red light being the last light to reappear later in the video when its core starts to angle away from the camera around frame 100:


Click here to view all 232 frames of the video.
In the 'Who Are We?" section of this website, I provide proof that I described the drone's appearance just minutes after viewing the drone, months before I began this analysis.Altogether, this simple color alteration proves the three most important aspects needed to confirm the technology powering this drone and my eyewitness testimony: the transparent core of the drone, its lack of visible components except the ones I described, and its core shifting the appearance of the light passing through it. Additionally, this confirmation of the drone's appearance eliminates the possibility that any conventional propulsion system or known consumer technology is powering it. But keep reading, this is just the beginning of the many phenomena that confirm this drone's use of gravitic propulsion.Next, I will detail every movement from the drone that I witnessed before, during, and after recording the video.
Four Flight Modes
An accurate description of the drone's flight modes that I witnessed in person
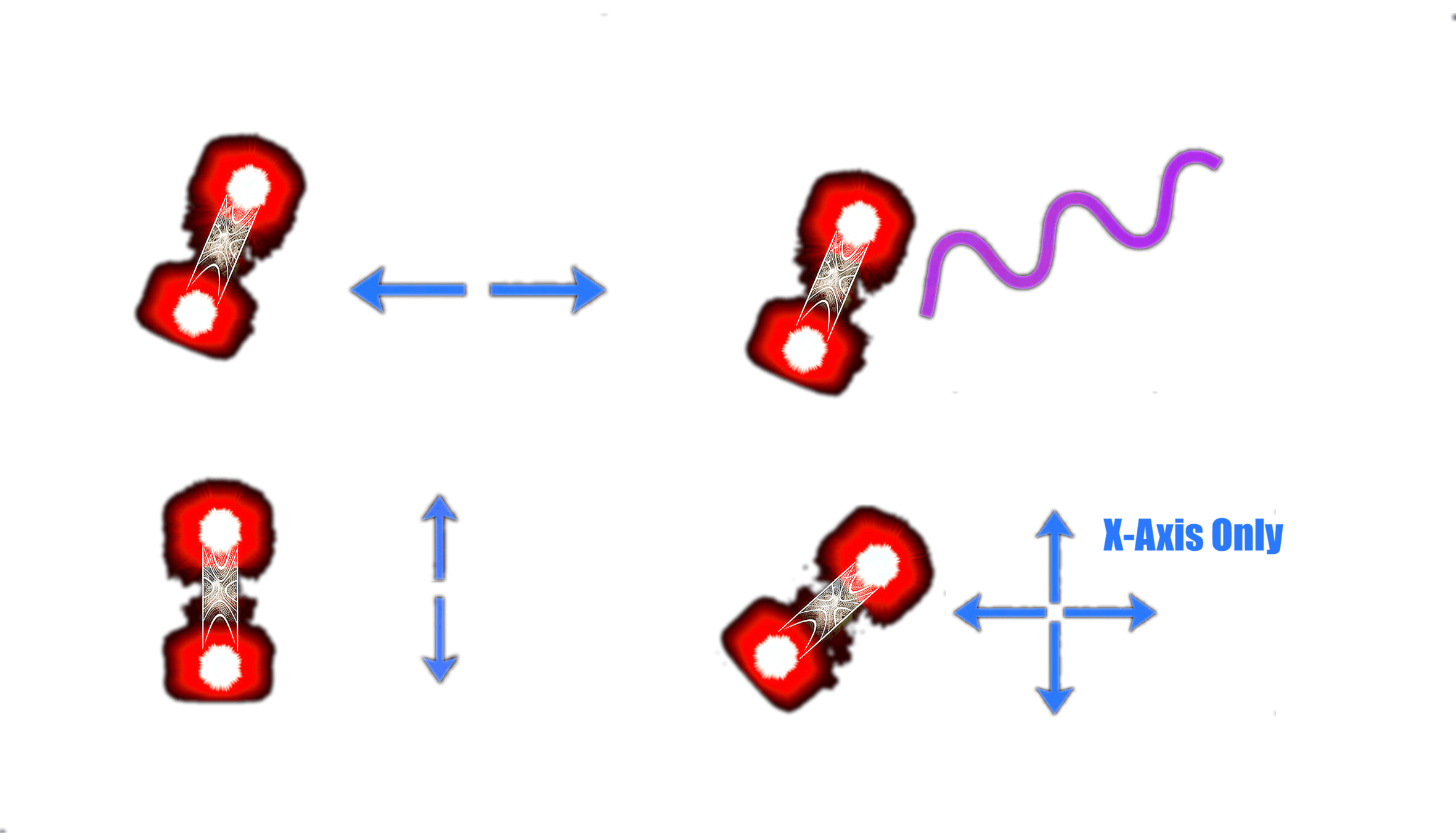
In person, the drone had four distinct modes of travel. In every mode, the top light of the drone led the drone’s travel while the bottom light trailed behind. Each time the drone switched directions while in the same flight mode, it violently and perfectly flipped its orientation angle to the opposite sign (e.g., 45° to −45° or 25° to −25°). Though the drone's angle abruptly reversed for each change in direction, its shape and size remained constant, and its components stayed in a fixed position throughout the entire flight, unlike its constantly morphing appearance on video.
(Context for Axial Movement Descriptions Below)
Mode 1: Lateral Movement
(Click each photo below to play a short animation depicting each flight mode)
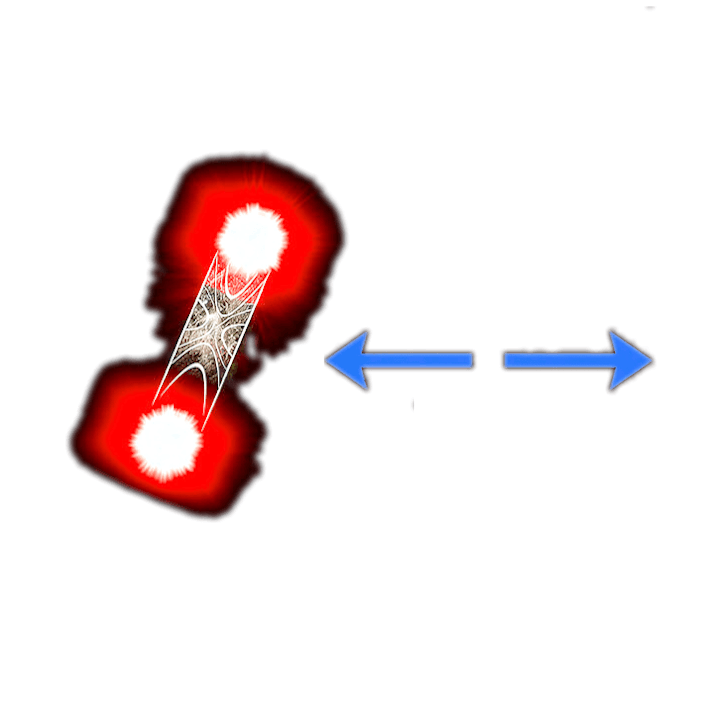
The first mode I'll describe is its lateral movement. In this mode, the top light would tilt to the left or right at around 25-30 degrees, and the drone would immediately glide in the direction that the top light was facing. In this mode, the drone could only travel on its x-axis to the left or right, and it could not move on its z- or y-axes.
Mode 2: Vertical Movement
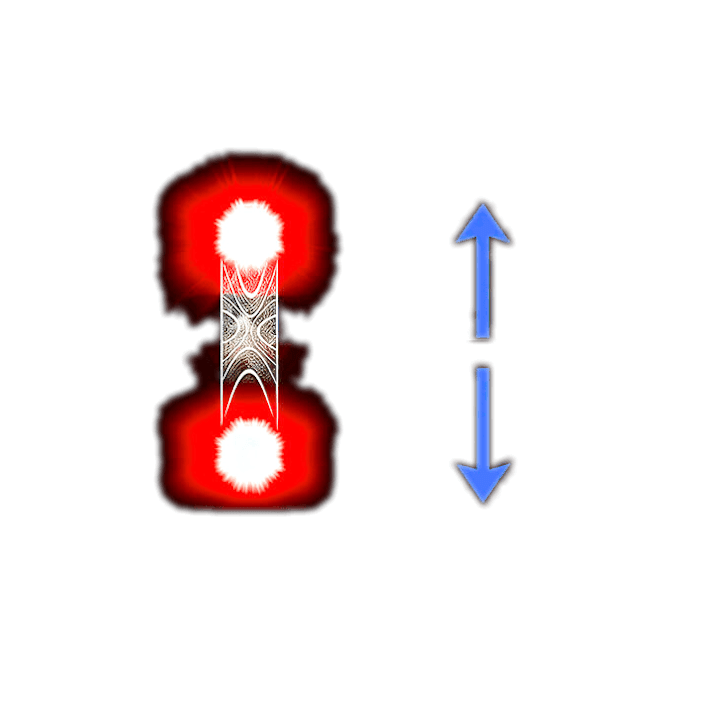
The second mode involved a movement where the drone was angled perfectly vertical, and the drone would either ascend or descend. In this mode, the drone could only travel up or down on its vertical plane, and it could not move on its x- or z-axes.
Mode 3: Wavelike Movement
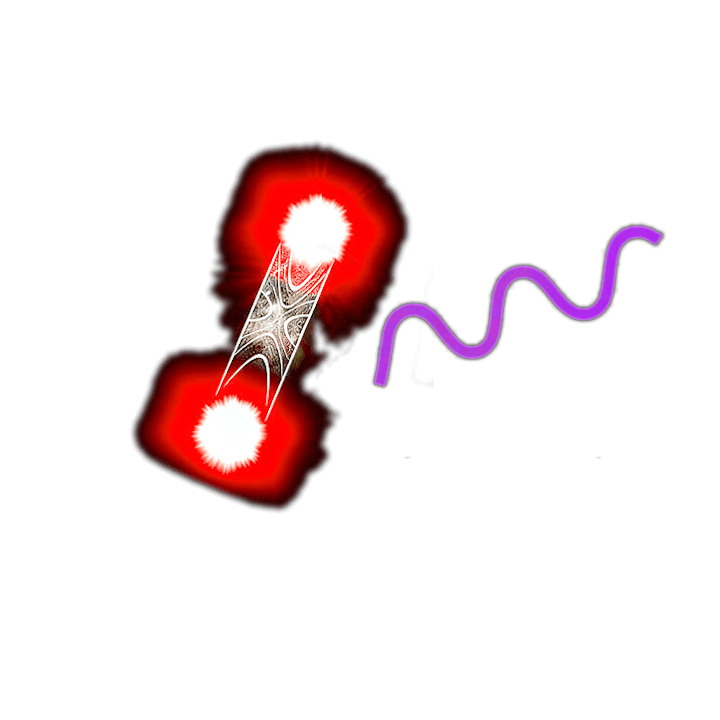
The third mode was a wavelike motion that allowed the drone to travel on its x, y, and z axes simultaneously. In this mode, the drone swam like a fish through the air, evenly increasing the height of each peak and trough by around 10 feet with each new wave. When the drone approached a new peak, it would quickly tilt its top light to ~10-15 degrees toward its direction of travel before beginning its climb, and when it approached a new trough, it would quickly increase the tilt to ~25-30 degrees before beginning its descent. During this mode, the top light was never even with or lower in altitude than the bottom light.
Mode 4: Horizontal Float Mode
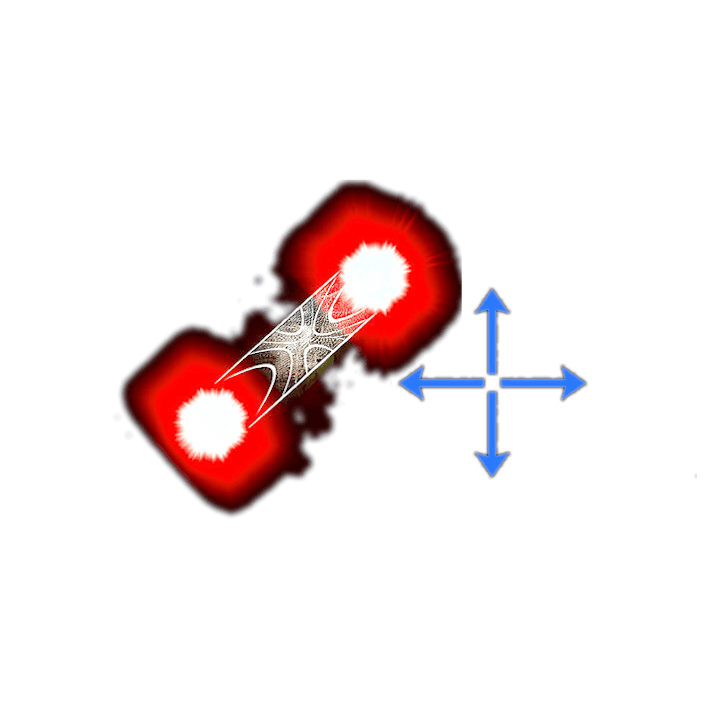
In the fourth and final mode, the drone would quickly snap to a perfect 45-degree angle and drift in whatever direction the top light was facing. In this mode, it could only travel horizontally, but unlike the first mode, it could move in all four directions on its horizontal plane. Despite being able to move along its x- and z-axes, it could not move along its y-axis and remained in the same vertical position. When it moved, it went in any of the four directions without turning as it went; but it followed in the direction which it faced, without turning as it went. In the other three modes, it was clear that it used no conventional form of propulsion, but in this fourth mode, the drone seemed to relax, and it was even more evident that the drone was effortlessly gliding through the air like an object floating in outer space. In this mode, the angular reversal of the top light was much quicker and more aggressive when it changed directions than its already rapid angular shift in every other mode. At one point, it cycled from this mode back to its basic horizontal mode, then back to float mode while remaining at the same altitude, so I am entirely sure that this mode is different than its basic horizontal mode.Unlike a conventional propulsion system that must expel mass in the opposite direction to generate thrust, this field-based alteration allows the drone to fly simply by shifting its localized warp bubble through the surrounding environment.
3 Modes On Camera
The three different flight modes captured in the video
The video starts with the drone in its 45-degree mode, floating smoothly through the air, akin to an object’s movement in a zero-gravity environment. Something noteworthy is that the beginning of the video is the only period during the entire encounter when the drone's top light did not lead its flight. Immediately after the first sensor glitch, the drone switches to its wavelike travel mode, although its movement in this mode is exponentially less pronounced on camera than it was in real life. Remember that during the video, the drone approaches the camera and drastically descends in altitude, although this movement is difficult to discern due to the drone's alteration of the surrounding photons and its influence on the camera's stabilization system. When the drone rotates to face the street immediately before it exits the frame, the drone switches from its wavelike mode to the mode where it ascends and descends vertically. For this switch, the drone rotated until its lights pointed towards the ground. This means that the mode that once propelled it only vertically could now only propel it horizontally.During the encounter, I observed the drone's movement after it completed its rotation into a horizontal orientation, and I got a clear view of it passing above the apartment, as shown immediately before the video goes black. At that point, I visually observed that the drone was clearly facing the ground and traveling to the left of the camera.
Key Flight Zones & Flight Recap
A visualization of the approximate locations of the key moments throughout the drone's flight, along with a description of what I witnessed

As I sat upright in my friend's bed daydreaming, I saw an unusually bright red light shining at the window. Before I opened the sunshades, I had a weird feeling that the light outside was something extremely abnormal, given the intensity of the light. Once I opened the sunshades covering the window, I witnessed two extremely bright red lights near the intersection, around ten feet above window level, pointing directly at me, with the top light angled towards me, while the strange object moved laterally towards my direction. My face immediately lit up like a kid in a candy store, as I instantly realized that I was viewing something spectacular. I was overcome with nothing but awe, intrigue, and happiness as I observed the drone, since I thought that a baby alien input the wrong coordinates and accidentally teleported to the middle of Atlanta. I did not feel fear, shock, or worry for even a single second as I watched it gracefully and silently dance through the air. The drone's beauty was indescribable; it felt like E.T. changed forms and found a new best friend. I thought the two lights on it might have been its eyes and that the "confused baby alien’s" face resembled a human face. The drone's silent operation as I was in its field led me to believe that the "alien" was not trying to draw any attention itself while it tried to fix its coordinates. Initially, I did not record the drone while it was in front of me because I thought that "my new alien friend" would instantly recognize if I was trying to record it and teleport away.
The drone was always in motion, and its speed remained constant except for the vertical movement I described earlier. About a second after I first opened the sunshades, it quickly switched directions by tilting its top light and began moving away from me on its x-axis, as if "the alien" was shocked that someone was present in the window. After traveling away from me for 2-3 seconds, it repeated this same side-to-side movement. Once the drone completed a couple of repeated lateral movements, when it was near the middle of the intersection, it angled its top and bottom lights perfectly vertical before descending and moving a few feet below window level. Then, it shifted back to its horizontal mode and performed its same side-to-side movement a few more times. After these movements, my memory went completely blank, and the drone now appeared to be directly in front of me, positioned just a few inches in front of the tree on the opposite sidewalk, as I described earlier. This period reflects when the drone operators targeted and attacked me with the drone, inducing cognitive phenomena that I detail later, none of which can be explained by any known technology. After it finished this movement, it ascended diagonally in a wavelike motion and flew next to the intersection. After it finished its ascent from below window level, it was now much closer to the corner of the apartment building, and it operated at around window level in the crosswalk, next to the tree and the lampstand. When the drone was close to the tree and the lampstand and operating around window level, it activated "float mode," its final, and in my opinion, its most beautiful mode of flight.
Float mode, which is the fourth mode described in the "Four Flight Modes" section, was by far the most intriguing mode. In float mode, it was even more obvious that the drone was floating on its own medium, completely ignoring the influence of any external force. It cycled through this mode a few times as it moved horizontally in all four directions on its x-axis, instantly and effortlessly snapping to a 45-degree angle each time. After shifting between this mode and its normal horizontal movement a few times, it traveled in its wavelike motion as it ascended to the spot where the video starts. Once I saw it start ascending at the same speed as its previous ascent, I became confident in my suspicion that it was a confused baby alien who was just learning how to fly. I thought that it was my one and only chance to capture an alien on camera, so I quickly reached down to grab my phone and start recording.Right before I started recording, I only saw the drone in the sky for a split second, but it was clear that the drone was operating around the center of the empty field across the street. I was confused about how it ascended to the center of the field in the few seconds it took for me to grab my phone, but I had no time to think about it and shifted my focus to recording the video. When I started recording, I knew that the drone was still in the area because I figured it was still moving at a constant speed, so I just pointed the phone toward where I thought it might be and hoped I hadn't missed my chance. As I started recording, I quickly and repeatedly glanced to the sky and back to the camera to see if I could spot it. While recording the video, I only clearly saw the drone's position in real life at around the video's 5-second mark, when you hear me saying, "Bruh WTF." I was startled because after losing sight of the drone despite scanning the sky, it suddenly reappeared directly above me. At this point, the drone was around 10 feet above the roof and pointing toward the ground, an orientation it had never been in before I started recording. When the drone flew overhead, I heard what sounded like a helicopter. Since helicopters land at Grady's heliport multiple times a day, and the drone emitted no sound when it was directly in front of me, I assumed that a helicopter was flying overhead. Upon checking flight radar data for the night, I learned that there were no helicopters in the area when the drone flew over the apartment's roof.Immediately after the video ended, I looked out the window to see if anyone was on the street. I didn’t see anyone on the street piloting a drone, so I continued with my assumption that I saw a friendly alien. About a minute later, after I realized that the drone wasn't coming back, I walked around the apartment, excited and shocked, with my hands on my head, continuously running around saying "HOLY SHIT," "WTF," and "OMG," for about 45 minutes. At the time, it was the happiest moment of my life. I also wanted to know if aliens were real; seeing an alien was at the top of my bucket list, and it looked so welcoming, beautiful, and friendly. I thought that it even gave me a little dance to show off how cool it was. I wasn't aware that I was inside the warp field of a spacetime-bending WMD flown by Chinese special ops soldiers on American soil, nor did I realize that they attacked me with the drone. Although part of me initially knew that there was a chance it could be government technology, I was too caught up in the beauty of the drone to care, and I thought, "If I die, at least I died happy and in a cool way." I understood how foolish it would be for the U.S. government to fly classified technology in the heart of Atlanta at 9 p.m. on a holiday, but I briefly considered the possibility that China was scanning the hospital or something of the sort. Initially, I also assumed that the lights on the drone stretched around the entire top and bottom; I did not realize that the drone's lights were pointed directly at me for the entirety of its flight before it ascended towards the hospital, until I closely examined the video after Matthew Livelsberger's warning.Now, let's explore the major anomalies that the drone exhibits on camera.
Active spacetime Manipulation
Redshift & blueshift
A fundamental principle of a warp field's effects on the frequency of light






In person, the drone never emitted any color or light besides an extremely bright red light at the top and bottom of the device, and the lights' position on the drone remained constant throughout the entire flight. In person, the drone's midsection did not contain any source of light. When I first watched the video, I immediately noticed that the drone's appearance on camera never accurately matched its appearance in real life, and I had no clue as to why there was a red glow in the drone's core for half of the video.I later learned that the red-orange glow in the middle of the drone seen in the video is caused by the camera capturing the photons in the drone's wake being pulled into the drone's spacetime expansion zone, not a physical red light within the drone. Once again, the core of the drone was nothing but a pneumatic tube with transparent warped light. The drone's core was only clearly observable when it was positioned directly in front of me, which explains why the redshifted light passing through its core is only visible on video when the drone's center is aligned with the camera, and disappears once the drone rotates away from the camera later in the video.The blue, purple, and green colors that are present around the drone throughout the video are caused by a blueshift of light due to spacetime compressing in its wake. These red and blue color shifts occur because the drone’s propulsion system operates by warping spacetime, expanding space ahead of its path and compressing it behind, causing a shift in the wavelength of visible light. This phenomenon is only observable on video and not in person due to the camera's ability to capture frequency shifts that the human eye can not see. A craft causing redshifts and blueshifts of photons is a fundamental principle in the majority of warp drive theories, and thanks to this drone's exposed core, this is the first "UFO" video ever to feature this crucial piece of evidence to conclude the weaponization of gravitic propulsion.On video, the redshift starts from the direction of the drone's travel, and the blueshift begins in the opposite direction, aligning perfectly with existing theories of an Alcubierre-type warp bubble. If this red glow were an emission from the drone and not a frequency shift, it would not completely disappear on camera while the core is still visible, and I would have observed it while the drone was directly in front of me. The location of the drone's redshift and blueshift also perfectly coincide with the two periods of time dilation that I experienced when the drone was around 50 feet in front of me and while it passed directly overhead, which I detail later.
Redshift and blueshift zone after adjusted color scopes
Another example of how the drone alters the surrounding light


Along with the photons in its immediate area, the drone causes a redshift and blueshift of the photons in its surrounding area. The redshift in front and the blueshift behind match the drone's central redshift beginning in its direction of travel.
Red vs Blue Dominant Pixels
Comparing pixels with dominant red-channel values to those with dominant blue-channel values reveals a clear pattern. The drone's wake features a higher volume of blue-dominant pixels, while the area in front of the drone features a higher volume of red-dominant pixels.
Luminance Suppression Near the drone
The drone substitutes the surrounding light for darkness
Lowered luminance
RGB values below [30,30,30]
When you decrease the luminance of the video, a dark horizontal zone surrounding the drone becomes apparent, with the darkest pixels orbiting the drone.
Darkest Pixels Orbiting The Drone
(Colors Enhanced For Visibility)




The drone's field shifts the wavelength of the surrounding light past the visible light spectrum, suppressing the luminance detected by the iPhone camera. Such suppression is consistent with gravitational fields affecting the wavelength and direction of the incoming photons.
The drone's immediate radial field
Visible radial distortion is present in the drone's immediate area throughout the video
When you increase the luminance of the video, it becomes clear that a radial field of distorting light surrounds the drone throughout its flight. In Alcubierre's original 1994 paper and in numerous warp drive papers published after, a thin shell of negative-energy density is required to create a warp bubble around a craft. This thin bubble is needed to protect the craft from the extreme gravitational gradient of its field, which would destroy the drone if it were left unprotected.
Fluctuating shape and size
Despite the drone maintaining a fixed appearance in real life, its appearance constantly shifts throughout the video, unlike any known technology.

One of the most obvious and unusual aspects of the drone is that it appears to change size and shape throughout the video. In person, the drone's size and shape remained constant throughout its entire flight. The drone was about the size of a stoplight, and was around 2.5 to 3.5 feet long and around one foot wide. Despite the size never scaling accurately on video as it moves closer to the camera, the drone's length and width fluctuate throughout the video, with the drone sometimes shrinking despite moving closer to the camera. This discrepancy is due to the drone's localized spacetime manipulation affecting the geometry of the light in its surrounding area. The warp bubble's orientation fluctuates throughout its flight, constantly changing how the surrounding light is bent and subsequently interpreted by the camera. The camera isn’t capturing the drone's actual appearance; it’s capturing the warped light from it after it’s passed through the drone’s field. This phenomenon is best observed by analyzing the morphing appearance of the drone's top and bottom light and when the drone’s redshifted middle is aimed at the camera from frames 65 to 94, where it becomes clear that its gravitational field alters light paths. This morphing appearance is perfectly consistent with what you would expect if its field were actively manipulating the intensity and geometry of the surrounding light.


The frame that most closely resembles the drone's appearance in person is the frame on the left. An interesting fact about this frame is that when you rotate it 45 degrees, the drone appears perfectly vertical. This is noteworthy when you consider the drone's distinct and exceptionally smooth 45-degree flight mode that I witnessed in person and documented before I noticed the rotation anomaly in this frame. 45 degrees is likely the angle where the drone's warp bubble is most stable.






As the drone rotated into its horizontal orientation to face the street, it was significantly larger in person than its size on video, which becomes even more abnormal considering that my camera was zoomed in during this period. When analyzing the drone's appearance after it assumes a horizontal orientation, it becomes clear that the drone's field distorts the surrounding photons by observing the curved orientation of both red lights on the drone. Because the red lights are fixed in place, any visible distortion reflects the camera’s processing of the incoming photons, rather than a physical shift of the light's position. As the drone travels off the edge of the frame, the trailing red light both curves downward and shifts past the visible light spectrum, something that is impossible in a conventional video.
Muted Movement & Scaling Issues
The drone's movement, descent, and approach on camera never reflect its actual movement and position in the sky
The first thing I noticed when I watched the video was that, along with its constantly morphing appearance, its movement was also completely different in person than how it appears on camera. Despite the drone descending towards the camera in its wavelike motion, its movement and scale in the video never reflect how it traveled in real life. From the start to the end of the video, the drone traveled ~200 feet toward the camera as it drastically descended in altitude. What initially seems like a strange camera anomaly becomes a smoking gun for concluding that the drone manipulates the surrounding spacetime. This scaling issue aligns with a known hypothesis on how a warp bubble would distort the apparent size of surrounding objects and the objects inside its field, and reflects a well-known phenomenon of how the force of gravity distorts the size and movement of objects in and around its field in a way that would be contradictory under normal gravity.It is clear that the bubble’s curvature dynamically controls the gravity in its area, counteracting normal perspectives, making accurate spatial imaging impossible. This makes this technology perfect for stealthy operation, as air defense sensors can't accurately determine the object’s position in spacetime, making the drone virtually impossible to counter with any drone defense technology. The drone flying closer to the camera is confirmed by both my visual observation of the drone’s position at the start and end of the video and the video's blackout that occurs shortly after the drone rotates into a horizontal orientation, which I detail later.
True Black Pixels
Blue pixels represent true black values (RGB = 0,0,0)
True black pixels enlarged x5.
True black pixels
These true black pixels reflect areas where the sensor outputs a blank color value due to either no or very little light reaching the sensor, or photons beyond the visible light spectrum producing no electrical charge in the sensor, causing the camera pipeline to output a pixel with an RGB color value of 0,0,0. The second true black value is remarkably present in the very center of the drone.For reasons unrelated to the lone true black pixels, which I explain later, the ISP outputs frames that are entirely black when the drone flies directly overhead. When the sensor begins to recover after displaying these black frames, the ISP continues to return true black values near the drone's last location, providing evidence that the photons near the drone's last position remain heavily distorted. This provides more evidence of the drone shifting the frequency of the light in its immediate area. No known propellerless or wingless propulsion technology can cause any of these phenomena.


As I mentioned earlier, in person, there was no warped light in the very center of the drone's core, and it appeared to either be the source or attractor of the light waves. Along with the second true black value being present in the very center of the drone, once the drone's appearance on video begins to resemble how it looked in person, in this frame, there is a visible difference in the luminance of the very center of the drone's core.
An "Impossible" Time Discrepancy
The drone finished its rotation before the camera captured the motion
During this portion of the encounter, I did not observe the drone rotating into its horizontal orientation. I only observed the drone after it completed this rotation. When I said "Bro wtf," the drone was already completely horizontal, although the video shows me saying "Bro wtf" before the rotation even begins. I vividly remember this part of the drone's flight, so I am entirely confident that the drone's rotation on video occurs after it already finished rotating in real life. No other technology can cause such a major time discrepancy between a drone's measured and actual position. Altogether, the drone's ability to alter how an instrument perceives the position, intensity, and timing of the photons in its vicinity makes this technology impossible to effectively counter.In the flight path reenactment at the top of this page, I depict this period from my viewpoint as it is more accurate than what the camera output.
ISP & Sensor Failures
Optical Image Stabilization Struggling Under Unusual Conditions
(Volume Up)
The faint rattling noise heard throughout the video reflects the optical image stabilization system struggling under unusual conditions. The only variable that could have created unusual conditions capable of causing the iPhone's stabilization to struggle was the drone. By examining the iPhone's stabilization behavior, it becomes apparent that the drone is creating some alteration that the ISP is struggling to process.This next section details exactly why this happens:
Motion Detection Manipulation
Constant stabilization issues in the drone's area & multiple severe stabilization failures once the drone rotates and flies directly overhead
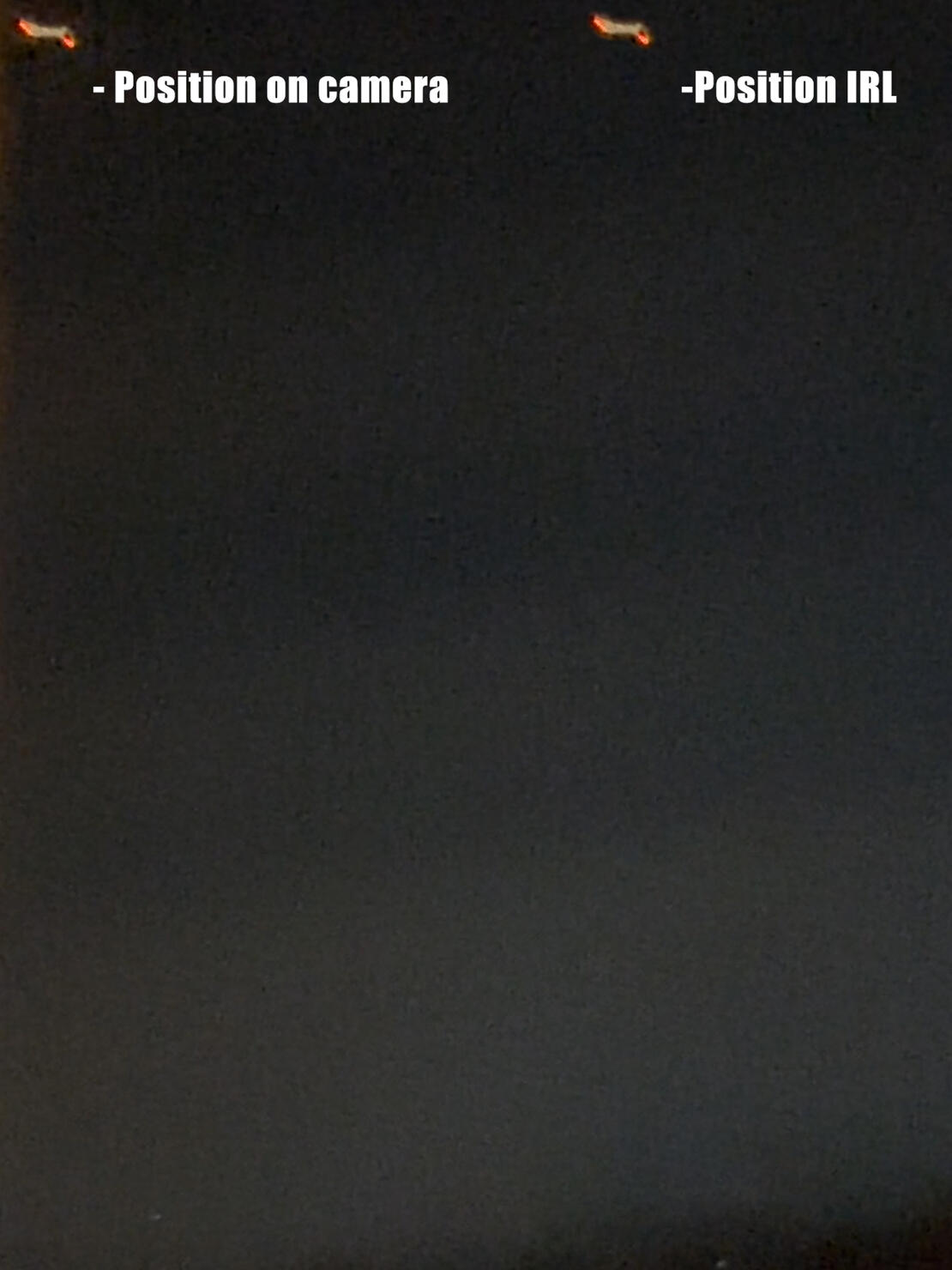
The opening wide shot establishes both the surrounding scenery and the camera’s sensor area
In order to understand these anomalies, you first need to know what object was in the foreground above and below the camera, and a basic principle of how iPhones stabilize videos. iPhone cameras have a larger full sensor area than what is output in the final frame. The extra space above and below the final frame provides extra room for the image signal processor(ISP) to stabilize the image if needed. While the camera is using the default 1x zoom, the blinds located above and below the camera are barely visible in the video, which guarantees their presence in the full sensor area. When the camera zoomed to 3×, it used a digital crop of the main 1× sensor instead of switching to the 3× telephoto lens, since the ISP detected that the lighting conditions were too low for the telephoto sensor to capture a clean image. This means that despite being zoomed to 3x, the full sensor area was used throughout the entire video, allowing the blinds above and below the camera to be used for stabilization purposes if needed.These two blinds are crucial for determining the drone's effect on spacetime by observing how the ISP attempted to stabilize the drone's movement.
The first stabilization anomaly occurs immediately before the drone changes appearance and the redshift activates
The first stabilization error occurs immediately before the drone's redshift onset. During this time, I was slowly moving my phone upward. However, given that the phone's upward movement before and after this shift was constant and not drastic enough to trigger such a dramatic downward shift, and the drone's drastic change in appearance succeeding this shift, you can logically conclude that an external factor, namely the drone, caused the camera to interpret that the phone suddenly shifted upward.This downward shift occurring immediately before the drone's redshift became visible, and as soon as the drone switched directions, provides further evidence that the drone is altering the path of the photons affected by the drone's field. This photon alteration caused the ISP to shift the crop window upward, translating the entire frame downward. An opposite directional translation can be observed later in the video, when the camera shifts the entire frame upward upon entering the drone's immediate field of influence.
The sensor detects movement in the drone's entire area and shifts the top of the frame to compensate, which is supported by the constant warping of the blind above the camera
As soon as the zoom completes, the ISP decides to recenter the crop window towards the top of the full sensor area, which shifts the scene downward. This is shown when the drone and star elongate and shift downward around frame 59. As a result of this shift, the light from the blind that was previously above the crop window is introduced into the frame. After the light from the overhead blind is introduced, it becomes clear that the drone is causing the stabilization to function abnormally as it flies toward the camera. As I mentioned earlier, until the drone rotates into its horizontal orientation, it is descending and approaching the camera. The camera only sensed substantial movement in the drone's area, so it kept the middle and bottom of the frame relatively stable and shifted the top of the frame to stabilize the movement it incorrectly interpreted as camera motion. Since cameras are not built for scenarios where space itself is warping, the ISP mistakes the drone’s movement and its influence on the surrounding spacetime for the camera physically moving, causing the ISP to stabilize the area of the frame affected by the drone’s field of influence. This stabilization error is also partially influenced by the weak signal surrounding the drone, which is confirmed by the drone's suppressive effect on the surrounding luminance, resulting in the drone holding an abnormally large percentage in the ISP’s motion calculation for the top of the frame. Altogether, the ISP’s perception of stability in the areas under the drone and motion in the drone’s entire surrounding area, instead of just movement by the drone, provides further evidence of unconventional movements in the space surrounding the drone, significant enough to alter the ISP’s ability to accurately determine motion.What initially seems like a motion miscalculation by the ISP becomes stronger evidence for the drone’s use of a warp bubble. The camera is not making an error by perceiving that the entire area surrounding the drone is moving; the entire area is actually moving, but the camera is incapable of differentiating between a movement of spacetime and camera motion. Remember that with a warp bubble, the drone does not actually move through space, but the bubble shifts the spacetime around the drone. Additionally, the presence of upward and downward shifts matches a logical sensor interpretation of the drone’s wavelike motion, which was required for the drone to move simultaneously on every axis.
The drone's rotation triggers the stabilizer to dramatically shift the image, despite no phone motion occurring
When the drone's field was close enough to significantly impact the camera, the entire frame shifted up and to the left. Keep in mind that the drone's position in the frame never accurately reflects its position in real life since the drone distorts the path of nearby photons. During this period, the drone is rotating into a perfect horizontal alignment as it concludes its approach and descent and shifts to a strictly horizontal mode of flight. Despite the drone appearing to be located to the left of the camera on video, right after it finished its rotation, it was located to the right of the window, very close to the intersection, and about 10-20 feet above the roof. As it rotates into a horizontal orientation, its effect on the surrounding spacetime becomes easier to observe since the drone is now only moving on one axis instead of both. Since the drone is to the right of the window during its rotation, the field above its leading red light drops toward the camera, resulting in a stabilization anomaly directionally consistent with an expansion of spacetime.As the front of the drone's field drops toward the camera, the camera interprets a sharp right and downward movement of the light being recorded and shifts the image to the left and upward, despite the camera remaining stationary. In a normal scenario, if you move your camera to the left and upward, or if the objects being recorded uniformly drop to the right and downward, your phone would shift the crop window down and to the right, causing the final image to shift in the same direction as the camera's physical movement or the opposite direction of the light's movement, which would stabilize the image. The camera violently shifting the frame to the left and upward upon its rotation makes perfect sense given that the drone's leading edge physically expands spacetime, which is also supported by the initially transparent core first redshifting on the edge leading its travel as it approaches the camera.Given that the drone's rotation affects the geometry of spacetime and that the leading light represents its expansion zone, the spacetime being captured by the camera physically moves down and to the right, causing the stabilization system to engage despite the camera's position remaining relatively stable. The camera's perceived diagonal movement of the scene also aligns with the drone's field rotating on multiple axes at once.In person, I observed that each of the drone’s directional changes were extremely quick and violent, which perfectly matches the sudden and violent nature of this stabilization shift. The fact that this dramatic stabilization shift begins at the exact moment the video reflects the start of the drone's most intense rotation, and the fact that the stabilization finished this dramatic translation as soon as the rotation was completed, drastically decreases the possibility that anything other than the drone's rotation could have caused these unusual stabilization anomalies. The drone's low-luminance zone also rotates at roughly the same angle as the field's rotation, providing further evidence for the drone's effect on the surrounding gravity, light, space, and time. The camera detecting more significant movement surrounding the drone during this portion can be confirmed with an anisotropic analysis of the pixel motion during this section, providing even more evidence that the drone's rotation affects the geometry of the surrounding spacetime, creating these anomalies. As you can see, warping the very medium that's needed to interpret light makes accurate detection impossible for any device that depends on a typical and constant flow of spacetime for operation.
The final stabilization anomaly before the blackout
The drone remains in the same vertical position on video after completing its rotation, matching my eyewitness description of the drone's horizontal-only movement after it finished rotating. After the drone completes its rotation, the iPhone determines that the drone is the subject and attempts to stabilize its movement. An anisotropy analysis verifying greater movement in the drone's immediate area during this last stabilization anomaly before the blackout provides additional evidence that the camera focused on the drone, which confirms that the ISP was attempting to stabilize the drone's movement during this portion of the video.Even though the drone stays in roughly the same vertical position on the frame, matching its constant vertical position in real life, the stabilizer warps the rest of the frame vertically towards the drone in an attempt to keep the drone's position stable, despite the constant vertical position of the drone, camera, and every object in the foreground. This means that despite every object in the scene and the camera remaining in the same vertical position, the camera still detected a significant downward movement of the scenery or an upward movement of the camera, causing the stabilization system to dramatically shift the entire frame upward to nullify the perceived movement. Altogether, the phone’s decision to apply a vertical correction, despite no vertical movement from any visible factor, provides further evidence that the drone is shifting the gravity, light, and space in its vicinity.
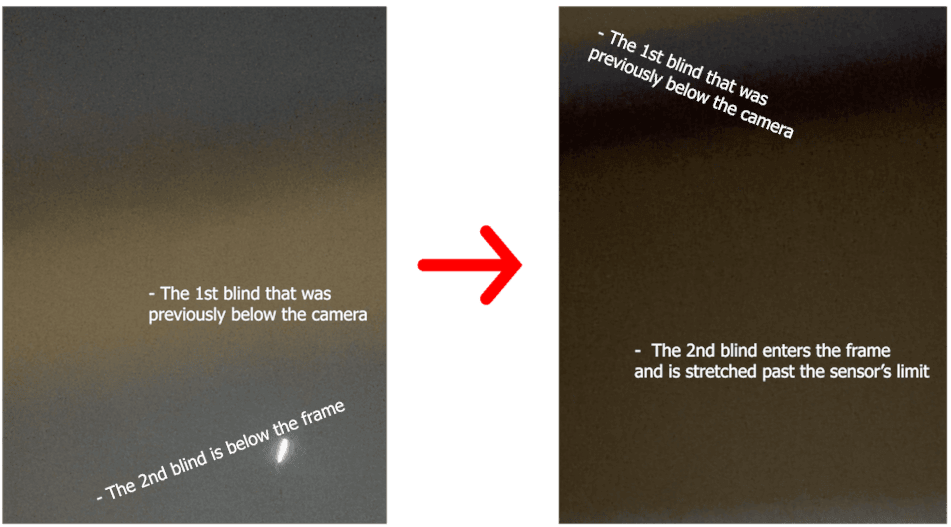
The stabilizer encounters movement so extreme that it exceeds its limit and attempts to stabilize past the sensor area, despite the phone remaining steady and the drone's prior exit from the frame
A stabilization error more severe than all of the previous errors occurs around forty frames after the stabilization system first resets on frame 143, when the video first went black. Despite the drone being out of the camera's view, the stabilization system was still incorrectly detecting an abnormally high downward movement of the camera or an upward movement of the light, causing it to shift the crop window downward. The stabilizer detects a movement so extreme that when it attempts to stabilize the frame, it exceeds its limit and runs out of sensor area to use for stabilization. The drone being out of the camera's view during this extreme warp eliminates the possibility that the stabilization errors are simply caused by the camera erroneously tracking the drone's movement, but instead provides more crucial evidence for concluding the field-based nature of the drone's technology.If the ISP reaches the end of the sensor area while stabilizing the frame, it will begin to duplicate the pixels at the edge to maintain a complete image, which is shown by the stretching of the foreground object that was located at the very edge of the camera's crop window, the second blind below the camera. In extreme cases, if the movement is so severe that duplicating the edge pixels is not enough to stabilize the movement, it will resort to adding padding to the edge of the frame, which is exactly what happens during this period of the video, which is shown by the faint grey line at the bottom of the frame below.This severe warping, which exceeds the camera’s limits, occurring while the drone is out of view, proves that the drone's technology is field-based and impacts electronics in a way unlike any known technology:
This severe stabilization warp can only occur under extreme motion, but once again, there is no movement from the blinds or phone, which is confirmed by the star returning to roughly the same position after the stabilization system resets. Throughout the entirety of the video, the phone was relatively still, and the blinds remained in the same position. The only object moving significantly enough to affect the stabilization system is the drone. So, what do you think could possibly cause the phone to detect such abnormal and extreme motion, besides the wingless, propellerless, mostly transparent drone that's actively violating the laws of physics?In the next step, we will explore the anomalies that can only be caused by either a sudden bright light entering the scene or an abnormally high number of photons reaching the sensor.
Image lag while the drone flies overhead
Repeated pixel-well overloads provide strong evidence for the drone causing a sudden increase in photons
Multiple times throughout the video, the brightest lights in the frame freeze and persist across multiple frames and slowly fade away, instead of changing with each frame. This phenomenon is called image lag, and it happens when a CMOS sensor’s photodiodes, which translate incoming photons into electrons, take longer than expected to flush the electrons in preparation for the next frame. Given that the pixels that experience this phenomenon also experience a charge overflow immediately preceding the image lag, the primary causes of this error are either an extremely bright light entering the scene or a sudden increase in photons that exceeds the sensor’s limit, causing the brightest pixels to hold their charge for longer. As you can see, no extremely bright light enters the scene, and there is no brightness spike, leaving the only logical cause to be the photodiodes receiving a sudden increase in photons, which causes the brightest pixels to exceed their charge limit, causing them to fade away over the next few frames instead of resetting after every frame. Given that the drone is the only moving variable in the frame, the fact that this only occurred when the drone’s field was close to the camera, and the fact that the drone's only clearly visible light sources, the two red lights, are facing away from the camera, it is only logical to conclude that the drone's field causes this image lag by creating an anomalously large increase in photons in its vicinity.This leads us to the next ISP error: the three consecutive true black frames, which reflect another major ISP error and solidify the case for a field-induced photon overload.
Severe ISP Failure
3 instances of 3 true black frames in a row
Blue pixels represent true black values (RGB = 0,0,0)
When the drone’s field was close enough to significantly impact the camera's photodiodes, the sensor abruptly output three true black frames multiple times. If a CMOS sensor is overloaded by an unexpected and extremely bright light or an anomalous increase in photons, the readout will fail or the image integration will collapse, resulting in the sensor outputting blank frames. By analyzing the two anomalies that occur immediately before this blackout and the sensor recovery process (the charge lag that caused the star to overlay the blinds and the camera's stabilization failures), and through a visual analysis of the surrounding frames, we can determine the cause of the repeated true black frames.
Normal Exposure
Raised Exposure
Although it appears that all of the frames are completely black after the first blackout when the drone exits the frame until the star's return into the frame, raising the video's luminance reveals that the ISP was still producing images, although each frame until the camera resumed its normal operation was severely underexposed. This period of underexposure is an expected ISP response after encountering either an extremely bright light source or a sudden spike in photons, which are the same two potential causes of the image lag that occurred immediately before the true black frames. Since no luminance spike is observed with a visual or forensic analysis, and given that the only variable capable of significantly affecting the camera's sensor was the drone, you can effectively conclude that an extremely bright light source did not cause the image lag or the pipeline failure. After examining the recovery process, the chance that a stabilization failure caused the blackout is also effectively eliminated, leaving only one logical conclusion: the true black frames were caused by an extremely high increase in recorded photons.During each period of the camera's recovery after the true black frames, the ISP clamps the sensor to intake the lowest possible amount of light that an iPhone camera can record. As a result of the camera's quantization process, which rounds color values up or down, the darkest values in the scene are clamped to true black. Unsurprisingly, during this recovery process, a dark trail of true black pixels persists in the drone's trail, matching the low-luminance zone observed throughout the video. When you combine the earlier observation of the drone's immediate area possessing the pixels with the lowest luminance, it becomes even easier to conclude that the drone does not feature any abnormally bright lights capable of overloading a pixel well, leaving the only logical culprit to be the drone's field.After engaging its pixel-well overload defense mechanism for the first time, the iPhone needed a high-confidence light source in the scene to quickly resume normal operation. Once the star was reintroduced into the frame, this prerequisite for resuming normal operation was met, and the camera mistakenly concluded that it was safe to resume normal operation...twice.The same phenomenon of true black frames followed by the camera clamping the ISO to its minimum level occurs two more times as the drone continues its horizontal movement directly above the apartment. Next, we will analyze what happened during the next two blackouts:
The camera intermittently experiences the same failure while the drone continues its travel
The brightest pixels remain visible through the blackouts, showing that some pixels exceeded their charge limits

Frame 185
Frame 195
During the second occurrence of the true black frames, before the image lag of the star occurs, the star's pixels reach the maximum brightness value a pixel can reach (255), providing even more evidence that the photodiodes quickly became severely overexposed each time the camera tried to resume its normal operation. The sensor exceeding its maximum photon intake is evident by observing the photodiodes at the star's position on frame 195 continuing to discharge their electrons while the ISP outputs the three consecutive true black frames, as shown above. Remember that while this was happening, the drone was still travelling horizontally relative to the camera, maintaining the same altitude, and was visible from my point of view. So at this point, the drone's field is still close enough to significantly affect the camera. I only angled the camera down after the drone left my field of view. Along with the stabilization failures that repeatedly occur each time the image recovers, it is clear that the drone is causing both the camera's motion calculation and photon processing mechanisms to overload and malfunction.
Examining the brightest sections of the frame during the third and final failure confirms that a photon overload is the cause
During the third blackout, the entire frame is true black except for the brightest lights from the distant building. Despite the ISP intending to output an empty frame during this blackout, because the pixel wells from the brightest areas were severely overloaded, the sensor could not clear them in time, causing them to bleed into the next frames, as shown below:

Frame 211
Frame 213
Immediately before the third blackout, once again, multiple pixels recorded the maximum brightness value of 255. By observing the video's behavior during each blackout, it becomes undeniable that the camera received an extreme overload of incoming photons, which caused electrons in the pixel wells to exceed their capacity.When you also consider that I was able to observe the drone during this period without any visual discomfort, and with the video evidence matching my eyewitness testimony of the drone's movement and orientation, and given that the drone's two red lights were pointed away from the camera when this occurred, it becomes clear that the sudden introduction of a bright light was not the cause of this phenomena.
FPS changes & per-frame brightness confirm a photon overload
FPS changes in the metadata prove that the camera's struggles reflect a photon increase too extreme for the camera to maintain normal operation
The reason the camera alternates between normal operation and its pixel-well overload defense mechanism as the drone flies overhead becomes clearer when we examine how the FPS changes correspond to the repeated output of true black frames. Typically, iPhones don’t switch the FPS while recording unless the camera detects a changing light environment. When the FPS decreases, the camera determines that there is not enough light in the scene and that it needs to spend more time collecting light for the frame to be properly exposed. When the FPS increases, the camera decides that there is too much light in the scene and that it does not need as much time to reach a proper exposure. On frame 58, the camera completes its switch to the 3× digital zoom, which typically causes FPS drops because it records a smaller area and requires more time to properly expose each frame in low-light conditions.However, anomalous FPS changes in the data begin around the second time the ISP outputs true black frames, and continue until I angle the camera away from the window. By analyzing the video's FPS behavior during the first, second, and third blackout periods, the case for a photon overload being the cause of the anomalous sensor behavior solidifies. Before a frame is fully captured, the ISP is built to detect an incoming pixel-well overload and output true black pixels as a defense before they overload. During the first blackout, this defense mechanism succeeded, and the ISP abandoned capturing the image and prevented the photodiodes from accumulating any more incoming photons, resulting in the repeated true black frames occurring without a change in FPS. During the second and third blackout, since some pixel-wells overloaded before the pipeline reset engaged, the ISP decided that there were too many photons and momentarily increased the FPS. After realizing that the ISP decided to flush the pixel wells and stop intaking light, the pipeline returned to the baseline of 24fps.These FPS changes provide further evidence that the drone caused rapid and unusual photon alterations in the area, reflected in the sensor repeatedly perceiving a scene too dangerous to maintain normal camera operation, causing it to shut down each time shortly after it resumed normal operation, until the camera is angled away from the window. Along with this timing anomaly, the light continues to warp and converge toward the drone throughout this distortion period. Until I angle the camera away from the sky and capture the drone operators' car, after each time the ISP resumes its normal behavior, the stabilization system immediately resumes its abnormal warping, the image lag resumes, and the camera repeatedly shuts down to prevent a pixel-well overload. This drastically weakens the argument for any conventional explanations being the culprit behind any of the distortions observed during the video.Altogether, the data shows that while the drone flew directly overhead, the camera perceived either an abnormally bright light or an abnormally large amount of photons in the area, despite no extremely bright light source being present, along with something significantly affecting the motion of the scene. But after conducting an in-depth analysis of the sensor behavior, combined with a visual observation and my witness testimony confirming no bright light being introduced into the scene, an abnormally large increase of photons in the area caused by the drone's field becomes the only logical conclusion.
Comparing the luminance of each horizontal third of the video per frame
Comparing the luminance of each horizontal third of the video
Per-frame luminance reveals abnormal spikes after the drone finishes its approach
When the phone resumes normal operation after the 2nd blackout, the luminance begins to abnormally spike to previously unseen levels. These luminance spikes and drops provide further evidence that the drone is actively distorting the photons captured by the camera, causing severe CMOS sensor pipeline malfunctions each time the sensor attempts to resume its normal behavior. These spikes correlate with the image lags, true black frames, FPS shifts, and stabilization distortions, providing further evidence of the drone field's localized photon-manipulation capability, which creates sensor anomalies that can only be explained by an object that causes extreme changes in the light captured by the camera.
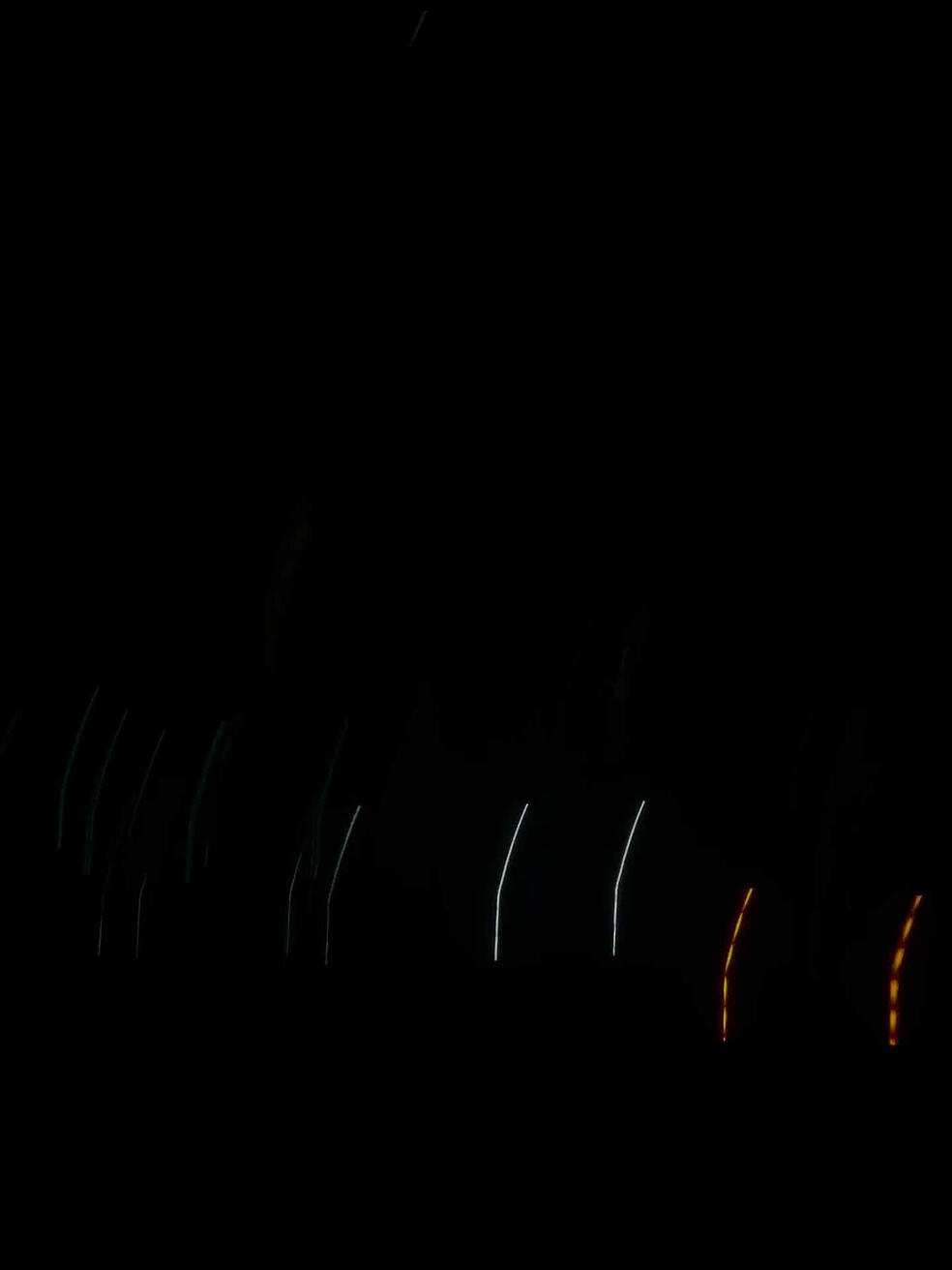
Optical flow algorithm failure
Severe motion estimation failures, consistent with a pixel well overload
The video above is what appears when you apply an optical flow time interpolation to the video. Optical flow is a video analysis method that estimates the motion of pixels between two adjacent frames of a video. The optical flow algorithm relies on predictable pixel movement and brightness between frames. Applying this algorithm to a video experiencing pixel-well overloads, abnormal stabilization behavior, and pipeline resets causes the algorithm to fail, resulting in severe visual distortions. In this video, these distortions begin shortly before the first blackout and last until the video ends.Altogether, the only realistic cause of all of the anomalies that begin once the drone is close to the camera is a sensor/ISP pipeline reset triggered by either extreme brightness or a sudden increase in photons. By observing and analyzing the video, which shows redshifts and blueshifts, severe stabilization malfunctions, and reveals that no bright lights were introduced, and by accepting the truthfulness of my witness testimony, the only logical conclusion is that the camera experienced a sudden increase in photons caused by the drone's field.
Government Response
Secret Service Response
In less than 72 hours, the same street was under 24/7 Secret Service surveillance for 60 hours straight
Less than 72 hours later, a 60-hour-long secret service event was conducted on the neighboring street. This operation featured a government bus that had a perfect view of the entire street of the drone's travel for the entire event, a Secret Service IMSI catcher that explicitly targeted me, which I provide evidence of, and buses cycling the area every 3-5 minutes for 60 hours straight in multiple directions. Many buses also cycled in the opposite direction from the Jimmy Carter Center, despite there being no Jimmy Carter event-related purpose for this movement. This event also received very little promotion and was never busy except for the first hour of the event when FOX 5 Atlanta was present. I later provide evidence that I was selectively targeted by their IMSI catcher, expand on the unusual nature of this "Jimmy Carter" event, and give more evidence for its relation to the Chinese anti-gravity drone in the "Who Are We?" section. Just like the drone video, all of this is publicly verifiable.
"Mystery" technology
No RF signals
Unjammable
No heat signature
Drone and missile defense systems require continuous tracking to effectively neutralize a target. The multiple anomalies that occur as the drone flies overhead my camera prove that continuous, accurate tracking by any system is impossible. Even though an iPhone's motion detection is incomparable to the capabilities of standard law enforcement technology or the military's billion-dollar drone defense systems, they both rely on the same medium to accurately determine motion: gravity, space, and time. By manipulating the very medium of reality, you render the detection capabilities of even the most advanced defense systems useless. This explains why China was free to fly their drones over critical military and civilian infrastructure in multiple countries, while no country could do anything to intervene. When you pair this with the destructive potential of spacetime-based weaponry, which is exponentially greater than even the strongest nuclear weaponry, it becomes obvious that these weapons are the greatest threat in human history. Matthew was not exaggerating when he stated that the continued use of this technology would result in a Mutually Assured Destruction scenario. You must also ask yourself, since these drones manipulate every wave that operates inside of spacetime, what type of computing do you think is required to operate these drones?
Video Verification & Download Links
Verifying Metadata/Camera roll check
Can't fake this
Here is proof that this is an actual iPhone video, using a live iPhone screen recording of the original video file, messages from that night, emails I sent to Sam Shoemate that he posted to Twitter, a live IMEI check, a synced camera capture of my phone and computer, all overlayed over an OBS screen recording of my computer performing a metadata check to prove the authenticity of this video. You can't fake this. Use ExifTool, MediaInfo, exif.tools, or any other method to extract and verify the full metadata. Use HxD or any hex editor to validate the hex of the original video file, or Python to reconstruct the video from the hex data. Use any method you can possibly think of to confirm the video's authenticity; this is the most important step.
Why should I trust Matthew & your testimony?
Accept a Lifetime of Lies
or
Accept Two Testimonies
To challenge or affirm the authenticity of my recollection of the drone's flight path, you must find another location in the area that fits an essential criterion for the drone's flight: a flat, reflective surface unobstructed by trees that is also discreet enough to deploy the drone. You will find none besides the apartment window I recorded the video from. When I started recording the drone in the sky, it was nearly invisible from my point of view and barely visible on camera. How could I have known its position if I were not alerted beforehand? I also would not have experienced the biological effects shown in the next section if I were not inside the drone's warp field. It is reasonable to conclude that mission speed would be a priority for the drone operators, since the risk of apprehension increased with every second their show of force continued. Ask yourself: why would the drone operator waste precious time flying the drone back over the apartment if it did not originate from that general direction, especially considering that their car was parked on the side of the street for the entirety of its flight, then turned into the apartment complex as it flew overhead?Later, I will also provide evidence that the Chinese and U.S. governments are fully aware that I witnessed their most secret technology and recorded the only "UFO" video ever taken that proves the operational use of spacetime manipulation and the first video showing the effects of a UFO on imaging sensors. You will also learn how Matthew was able to violate top-secret TS/SCI NDAs without immediate government intervention, and how I was able to release this video against their will, despite being an active cybercriminal at the time of China's drone incursion. After realizing the authenticity of our testimonies, you will be able to overcome a lifetime of manipulation and know the secret to obtaining limitless free energy for yourself. So, read until the end.
DRONE VIDEO LINKS
Proton
https://drive.proton.me/urls/034P99H8N8#X12RPNT7YB4qGoogle Drive
https://drive.google.com/drive/folders/1G2OPQzoxO2k3jfNBxln1bh_ffebb4wAD?usp=sharing
Hex Data
https://drive.google.com/drive/folders/1yopGubKL24dmbGp5JSeeBVSAI5m2z7OE?usp=sharingMetadata
https://drive.google.com/file/d/19rxhrfwu3NlHmg78d4NUVWGnkhSB2Rd6/view?usp=sharing
Since a video's authenticity can not be guaranteed unless you have access to the original video, I’m providing you with access to the original video file along with the hex data. I encourage you to analyze everything yourself! I recommend rebuilding the video from the hex data to avoid any compression artifacts caused by file sharing (you can use AI for this). Once again, I strongly encourage you to conduct your own research until you can arrive at a conclusion. If you doubt me, that is perfectly fine. There was even a time when I doubted myself, despite being the one who was just a few feet away from the drone. However, initial skepticism is not a valid reason to dismiss our testimonies. Finish reading this website, perform your own analysis, analyze our testimonies, and you should finally understand the truth.
Conscious & Biological Effects
Time Dilation
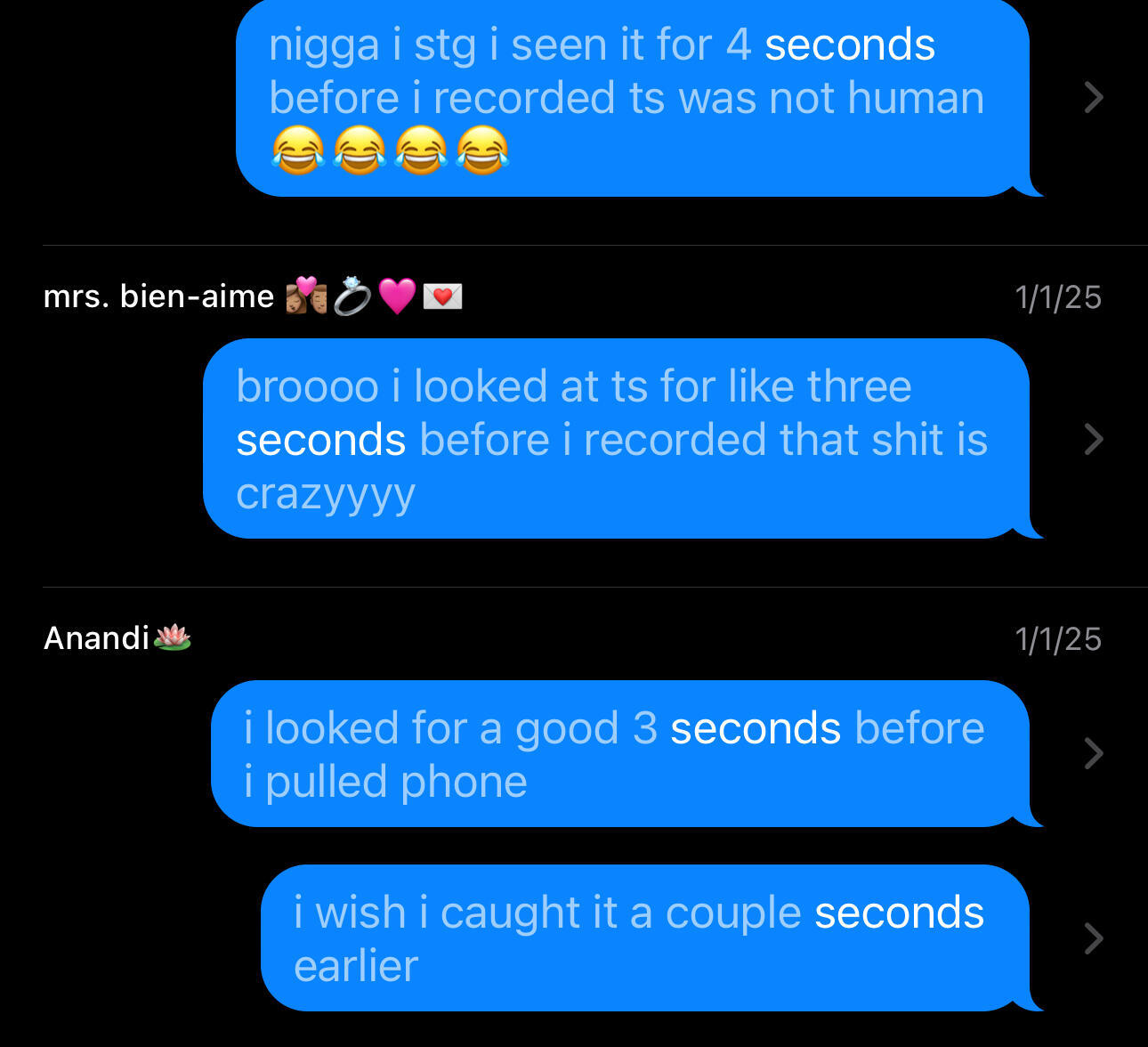
I experienced an altered perception of time when the drone was directly in front of me and when it flew overhead. As you see in my text messages, I reported only seeing the drone for about 3 to 4 seconds before the video began. However, if you watch my flight path recreation, you will notice that the drone's flight was much longer than 3 to 4 seconds. Immediately after the encounter, I continuously thought that I observed the drone for 5 to 10 seconds at most before I reached for my phone to record the drone. It wasn't until weeks later that I finally realized that I had witnessed the drone in operation near the intersection for much longer. This delayed error in time perception is due to the drone's time distortion and memory encoding errors caused by the drone's field. In actuality, before the video starts, I am 100% sure that I witnessed the drone for about 30 seconds. Along with the length of the video, the only reason I’m able to estimate an approximate length of the encounter is because the drone moved at a constant speed throughout its flight, and I vividly remember the majority of its movements.Immediately after ending the video, I looked outside to see if my alien assumption was wrong, and if anyone on the sidewalk or under the bridge was flying the drone. There was no one present, and no cars came down the street except for the tinted black car you see at the 9-second mark. During the entirety of the drone's flight, this was the only car that traveled on the street. After the drone left from my point of view and I angled the camera down, I vividly remember the black car traveling down the street around five seconds after I stopped recording the video. During this period, my perception of time was much slower than what actually occurred, as you can see the drone operators' car travelling down the street as the video is ending. As a result, I assumed that it was just a random car that barely missed an alien encounter. I didn’t realize that I filmed the car at the end of the video until a few weeks later. Before I even knew what time dilation was, I found these two instances of my warped perception of time extremely strange. After learning that the drone was manipulating the surrounding spacetime, time dilation from the drone was the only logical explanation for these two abnormalities in my time perception. No technology except for gravitic propulsion can cause this.For additional context, the bottom of my window was cracked open a few inches throughout the entire encounter.
Memory Gap
I lost consciousness during this portion of the drone's flight, which only lasted for a few seconds. Upon regaining consciousness, I was still in the same upright position, I retained awareness of the situation, and my gaze was laser-focused on the drone. Once I regained consciousness, I experienced two additional cognitive abnormalities during this maneuver, which I described below.
Warped Light Paths

Despite the drone appearing to be directly in the middle of my field of view when it targeted me during its vertical climb, my perception of the dimensions of space greatly differed from its actual positioning. When you observe the start of the video, it is clear that the graffiti I observed warping during the drone's vertical climb, which was directly behind the drone's core, is a few feet to the right of the window and not directly in front of the window. At first, this seems like a clear contradiction in my testimony, as the drone being aligned with both my window and the graffiti would be impossible under normal circumstances. However, given that the drone warps the position of the surrounding spacetime, it is perfectly feasible that this discrepancy would be present, especially considering that I was deliberately targeted by the drone operators during this portion of its flight.Along with this lateral discrepancy, during this movement, I have no recollection of the trees that are directly in front of the apartment window being present. The difference in what I witnessed and the actual positioning of the space in front of me can only be explained by the drone warping the path of light inside its field. Light passing through the drone's compression zone was strongly blueshifted and its paths through spacetime were distorted so that an overwhelming amount of the light from behind the drone reached my eyes, while light passing through the expansion region between me and the drone was redshifted, deflected, and weakened, reducing the visibility and coherence of the light from the foreground objects. This broke the normal correspondence between incoming light and spatial structure, severely distorting depth, distance, and object boundaries, so that the objects in between my eyes and the drone were rendered invisible from my point of view. Both of these mirror well-documented effects of objects that produce gravitational lensing, which I did not learn until months after this encounter. This is the only period during the drone's entire flight in which I am aware that this phenomenon occurred. This phenomenon is impossible under any known technology and is only perfectly consistent with gravitic propulsion.
Double Memory

As I was first describing the drone's flight path to my friend, I mistakenly said that the drone was just a few inches in front of me when it was performing its vertical 90-degree movement as it was positioned in front of me. I told him that the drone was in front of the trees on our side of the street, rather than in its correct positioning in front of the trees across the street. When I tried to recall this 90-degree movement, an intrusive vision of the drone ascending just a few feet in front of me kept overriding my memory. Once again, this 90-degree climb happened immediately after the only moment during the event when my memory is completely blank.
You could attribute this to being a normal PTSD response, as recalling PTSD triggers being closer than they were is a typical response, until you consider how I was overcome with only positive emotions and experienced no feelings of trauma, even as I was experiencing this warped recollection while I was describing the sighting to my friend. I suppose one could argue that this trauma was neurological rather than emotional. However, the multiple other abnormal cognitive effects surrounding this period of the drone's flight are extremely revealing, especially when you consider that this drone movement was presumably unnecessary if there was not an unintended witness, as this maneuver extended the time of their mission.When I learned that this “alien” was actually a drone, I initially assumed that the operator repositioning the drone directly in front of me was somehow necessary for the drone's flight. But given these cognitive abnormalities, I now know that the purpose of this movement was far more sinister than just a simple readjustment, and likely would have resulted in my death under normal circumstances. But thinking that I was forming a bond with a baby alien when I was actually about to be killed by a Chinese anti-gravity weapon of mass destruction is pretty funny in my opinion.
Double Thought
While I was observing the drone, I asked myself, "What exactly am I looking at?" A moment later, as I tried to understand what I was observing, an intrusive and overlapping thought suddenly emerged in my mind and said, "God." I paused in confusion for a second; although I held no religious beliefs, I knew that God definitely did not look like a baby alien with two red eyes, so I was confused about how this double thought arose. What’s strange about this thought is that it overlapped with my inner voice, causing me to experience two different thoughts at the same time. I am not claiming that this voice was God's voice.
Headache & Stomach Ache
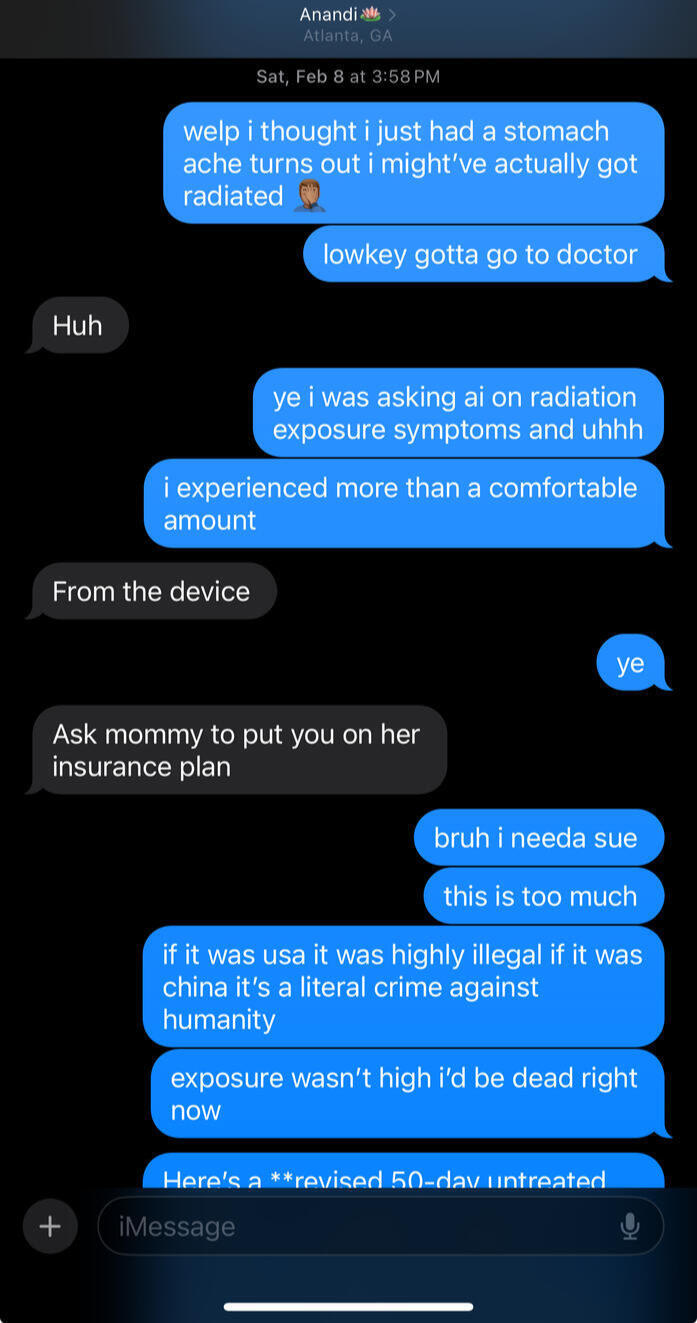
The next day, I had a headache that developed in the afternoon and lasted for most of the day. Throughout my life, I’ve had maybe only two headaches, leaving the only logical conclusion to be that I was experiencing a common side effect of exposure to radiation or a high-intensity electromagnetic field. I also took some Aleve that day and it was completely ineffective. That same day, I also developed a stomachache and diarrhea for the next few days (TMI, I’m sorry).
Skin Redness
For the first couple of days after the encounter, every time I scratched my skin, it would become noticeably red. I only remember this redness occurring on the upper part of my chest, although it might have been present when I scratched other parts of my body.
Photophobia & Watery Eyes
For the next few days after the encounter, I noticed my pillow was unusually wet every time I woke up. I also had to scratch my eyes a lot as they were frequently itchy, and it felt like something was stuck in my eye and would not come out. Bright lights also irritated my eyes for the next few days.
Increased Vivid Dreams
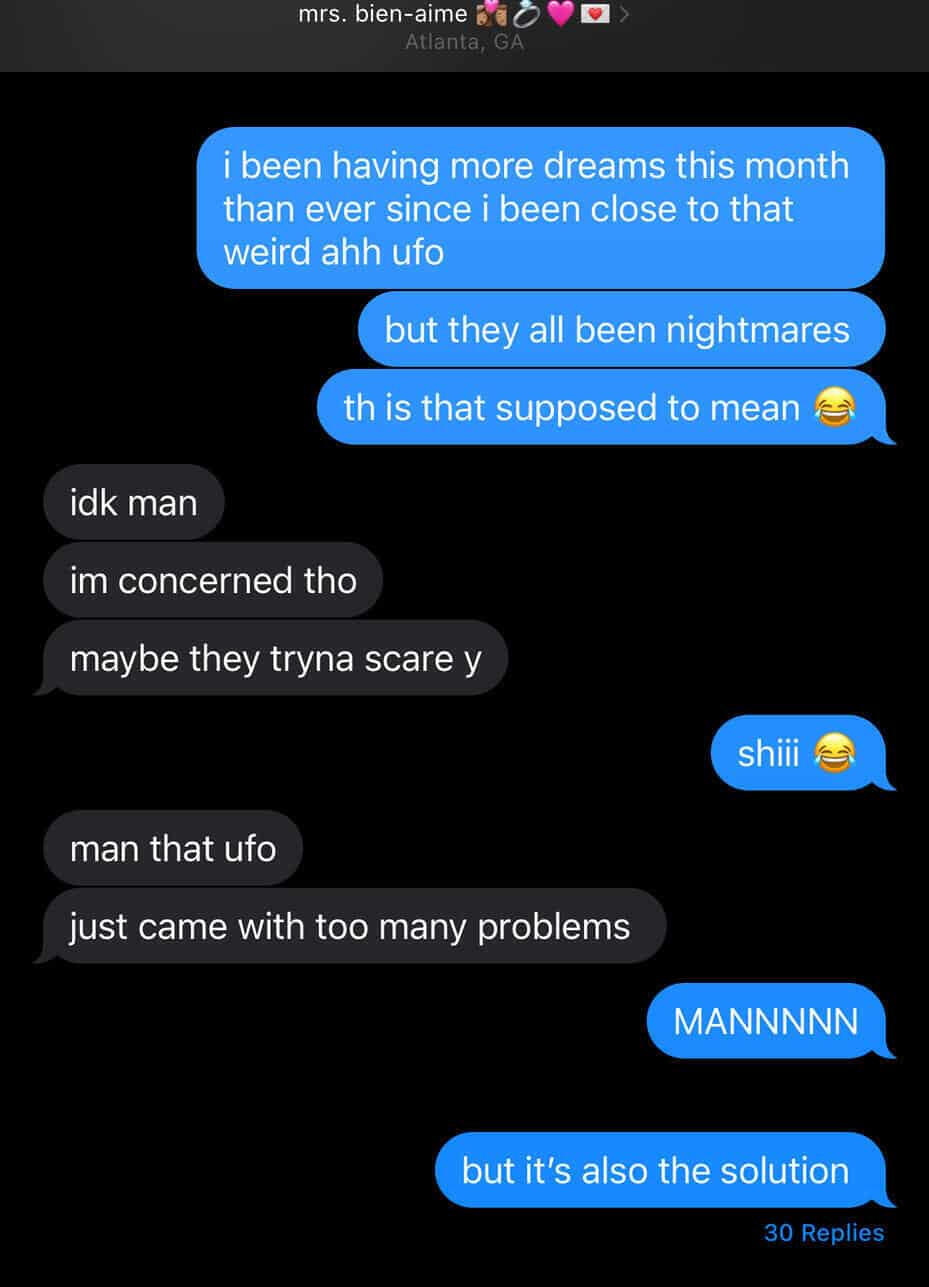
After witnessing the drone, I experienced an increase in vivid dreams, mostly nightmares, especially during the first month after the encounter. Throughout my life, remembering a dream was rare, and I'd typically only remember maybe one every few months.
Fatigue
I was noticeably more tired for the next week or so after the drone. I felt unusually sluggish for the entire week.
Delayed Effects
Tree Damage

When the drone flew vertically from ground level as it appeared to be positioned directly in front of me, its ascent began directly in front of the orange sign next to the crosswalk. On May 7, the date of this picture and 126 days after the attack, the tree that was just a few feet behind the drone was the only tree on the street struggling to grow leaves. This is a theorized biological effect of spacetime warping on plants.
Visual Snow Syndrome
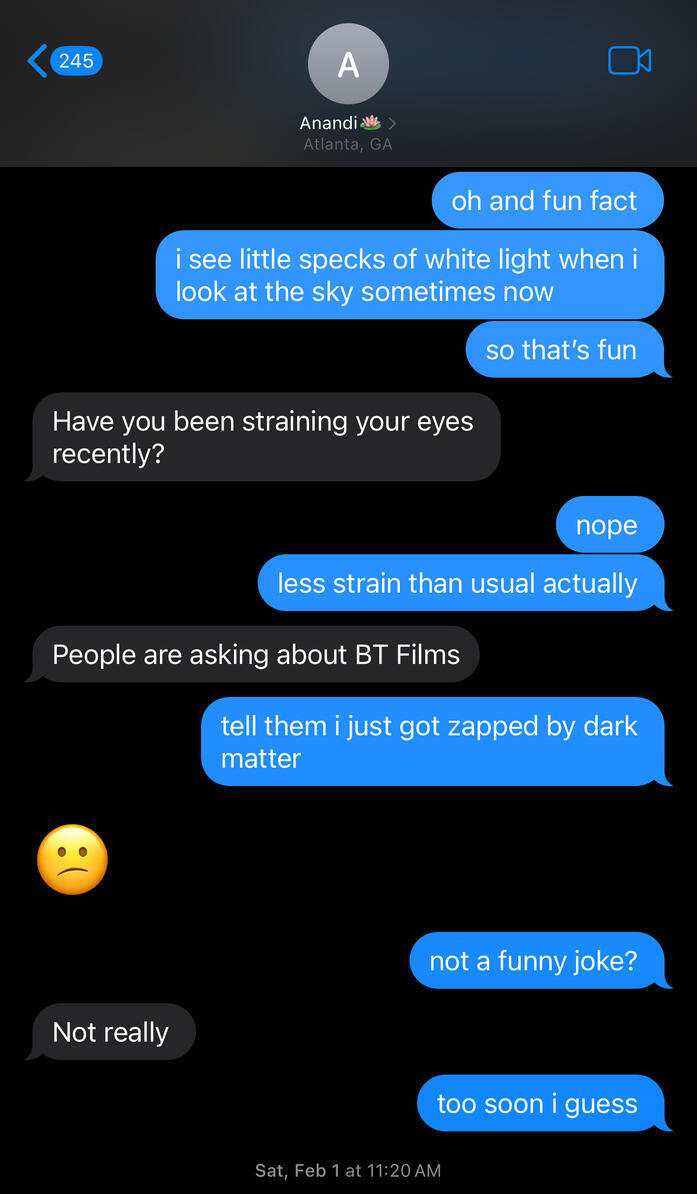
A few weeks after the event, I noticed tiny sparks of light in my vision. Initially, I believed that I was witnessing glimpses of other dimensions or something, but it turned out to just be visual snow syndrome. Additionally, when I look at a blue sky, I notice a bunch of dancing white floaters in my field of vision. I also see more frequent and more pronounced halos around light now.
Abdominal Pain
Around the time I noticed the visual snow syndrome, I started having instances of stomach pain and frequent foul-smelling farts. By foul-smelling, I mean like the stinkiest farts ever; they lingered for like 5 minutes too. This lasted for a little over a month. (TMI again, my bad, it’s for science).
Skin Shedding

Around day 70, the skin on my hands started to peel as shown above. This occurred on both hands and was not painful. I do not have any skin conditions that could cause this. This lasted for about two weeks.
Bilateral Skin Lesions
On day 130, I developed hyperpigmentation and cracked skin on both wrists in line with my pinky fingers. I do not have eczema or any other skin condition that could cause this. As I type this on May 31st, the discoloration is still present, with my right hand (the hand I recorded the drone with) showing the highest amount of cracking and hyperpigmentation. The cracking will fade sometimes during the day, but it returns after every shower. It turns out that bilateral skin lesions are a documented symptom after UAP sightings. It is now June 25th, and the cracking is gone, but the hyperpigmentation is still present.
Your most important takeaway after reading its biological effects should be understanding that the operators knew exactly how to manipulate cognitive processes with this technology. How do you think they obtained that knowledge? I can assure you, I was not the first unsuspecting human to be unexpectedly targeted by this consciousness-altering technology and placed inside a warp field. But don't just take my word, read about it for yourself (page 30). Yet, remember that all self-incriminating government research will remain classified; for example, Matthew’s Proton email.